
Les compétences en imagerie ne sont pas réservées à la 3D. Le développement d’Interface Homme Machine (IHM) représente une grande partie du travail d’un spécialiste de l’image.
Vous trouverez ci-dessous quelques exemples de produits développés en .Net ces dernières années et répondants à des besoins spécifiques à l’automatisme.
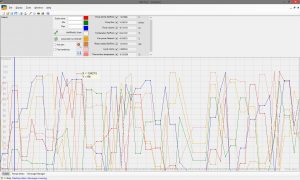
Module de graph rapide
Lors du développement d’un superviseur, la représentation des données dans le temps est très importante pour les utilisateurs. Il est possible de trouver des librairies réalisant cette fonction, mais bien souvent, la structure pose des problèmes de rapidité, de navigation et d’exportation de données. J’ai donc réalisé mon propre module de graph multi thread permettant de stocker des données plus rapidement que la milli seconde et gérant une quantité de données non limité. En séparant au maximum le Modèle de la Vue et du Contrôleur, il est possible avec cette librairie de stocker un grand nombre de données simultanément.
Pour ce qui est de la navigation sur le graph, une technique de « LOD » (Level Of Detail) et de « frustum culling » issue des algorithmes de 3D est utilisée. Cela permet sur un PC de bureautique de conserver une fluidité de l’ordre de 30 images par seconde quelle que soit la quantité de données à afficher.

Editeur de séquence
Dans l’automatisme, il est parfois nécessaire de réaliser des séquences de mouvement relativement au temps ou à d’autres paramètres internes à l’électronique ou aux différents capteurs du système.
Pour répondre à cette problèmatique, nous avons réalisé un éditeur reprenant le concept des éditeurs de musique (Cubase, Cakewalk…).
A l’aide d’un « Système expert du premier ordre » (voir Wikipedia), il est possible de prendre des décisions, de sauter dans le temps ou de setter des états de sortie. Cet éditeur de séquences doit bien sûre être suffisament fluide pour permettre un affichage capable de supporter la rapidité des actions des divers cartes électroniques et automates interconnectés.
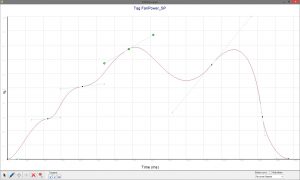
Editeur de mouvements
Dans l’industrie comme dans l’animation 3D, une problèmatique apparaît fréquement lorsque vous définissez le mouvement mécanique d’un robot : le mouvement doit être rapide, fluide et non saccadé.
Pour résoudre ce problème, nous utilisons des courbes des Bézier (voir Wikipedia). Il est donc primordial dans tous systèmes industriels, de pouvoir définir des mouvements s’appuyant sur ces théories. L’exemple ci-dessous montre le système que j’ai développé pour définir des mouvements à l’aide de courbes de Bézier cubiques.
Les applications
Il n’y a pas de réelle limite à l’utilisation des compétences de l’imagerie dans le développement d’interface conviviales. J’ai de nombreux exemples que je pourrais présenter ici mais pour des raisons de confidentialité, je me suis limité à quelques principes…